
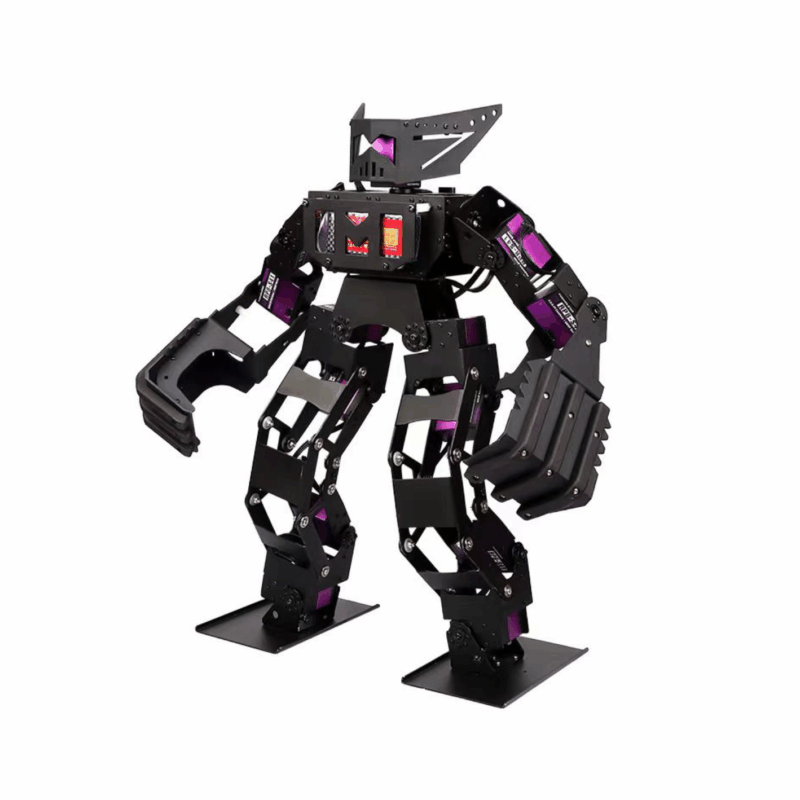
Robot humanoïde (Joe Boxer)
$1,300.001.Caractéristiques
- Prise en charge de la conversion du signal TTL half-duplex en full-duplex
- Niveaux TTL sélectionnables : 3,3v / 5,0v
- Permet la configuration de l'ID et le réglage des paramètres pour le servo-bus
- Facilite la communication entre les appareils TTL et les PC ou autres plates-formes hôtes
- Protection contre l'inversion de polarité pour améliorer la sécurité des circuits
2. Spécification
3. Définition de l'interface
4.CAD Dessin
5. Schéma
| Corps |
Alliage d'aluminium découpé au laser |
|---|---|
| Tête |
Imprimé en 3D |
| Bras |
Alliage d'aluminium découpé au laser |
| Articulations |
Entièrement supporté par des roulements |
| Servos |
25Kg de servos distribués sur bus série (RA8-S22) |
| Cornes de servo |
Cornes en aluminium encastrées à 8 trous |
| Tableau de contrôle |
Ardurobo1 + Arduino UNO |
| Capteurs |
Capteur à ultrasons ,capteur de reconnaissance gestuelle ,gyroscope ,Écran matriciel RVB |
| Dimensions (L × L × H) |
574 × 124 × 387 mm |
| Poids |
1,85 kg |


Avis
Il n’y a pas encore d’avis.