















| Type de protocole |
UART |
|---|---|
| Tension d'entrée |
9.0-12.6v |
| Type de moteur |
Moteur sans balais |
| Capteur de position |
Codeur absolu magnétique 12 bits |
| Gamme de positions effectives |
±180° (mode de contrôle de position monotour) | ±368 640° (mode de contrôle de position multitour) |
| Résolution |
4,096/360°(0.088°) |
| Processeur |
MCU 32bit |
| Débit en bauds |
9 600bps~1Mbps |
| Gamme ID |
0~254 |
| Taux de réduction |
173:1 |
| Spécification de la cannelure de sortie |
Acier inoxydable / Ø6mm / 25T |
| Matériau de l'engrenage |
Engrenage composite entièrement métallique en acier inoxydable |
| Interface |
PH2.0-3Pin |
| Matériau de l'étui |
Boîtier en alliage d'aluminium CNC |
| Dimensions |
40×20×40mm |
| Apparence |
Double arbre |
| Poids |
83g |
| Température de fonctionnement |
-10~60℃ |
| Mode de fonctionnement |
Mode de contrôle de position monotour | Mode de contrôle de position multitour | Mode d'amortissement |
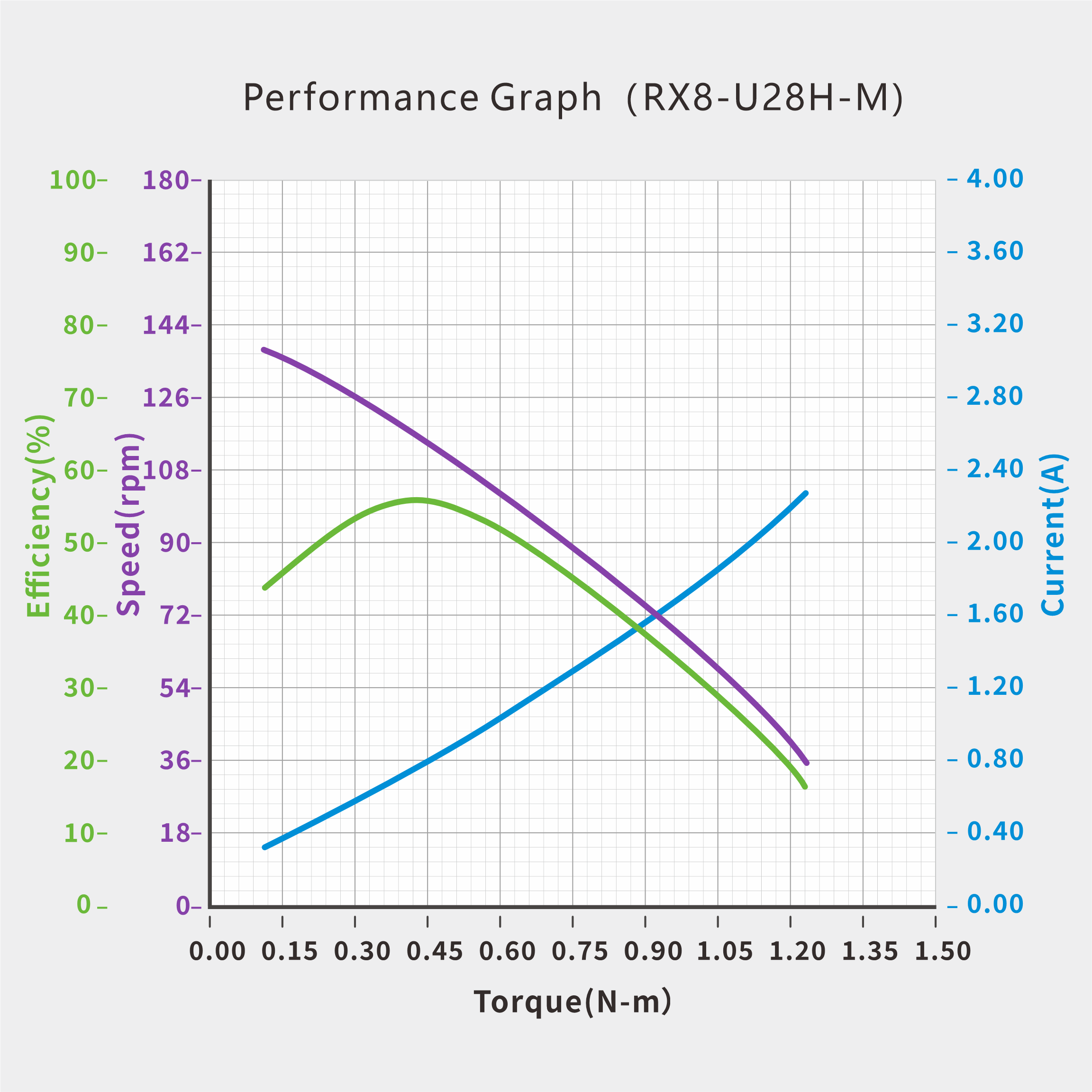
| Couple maximal de décrochage |
2,74N-m (28kg-cm) |
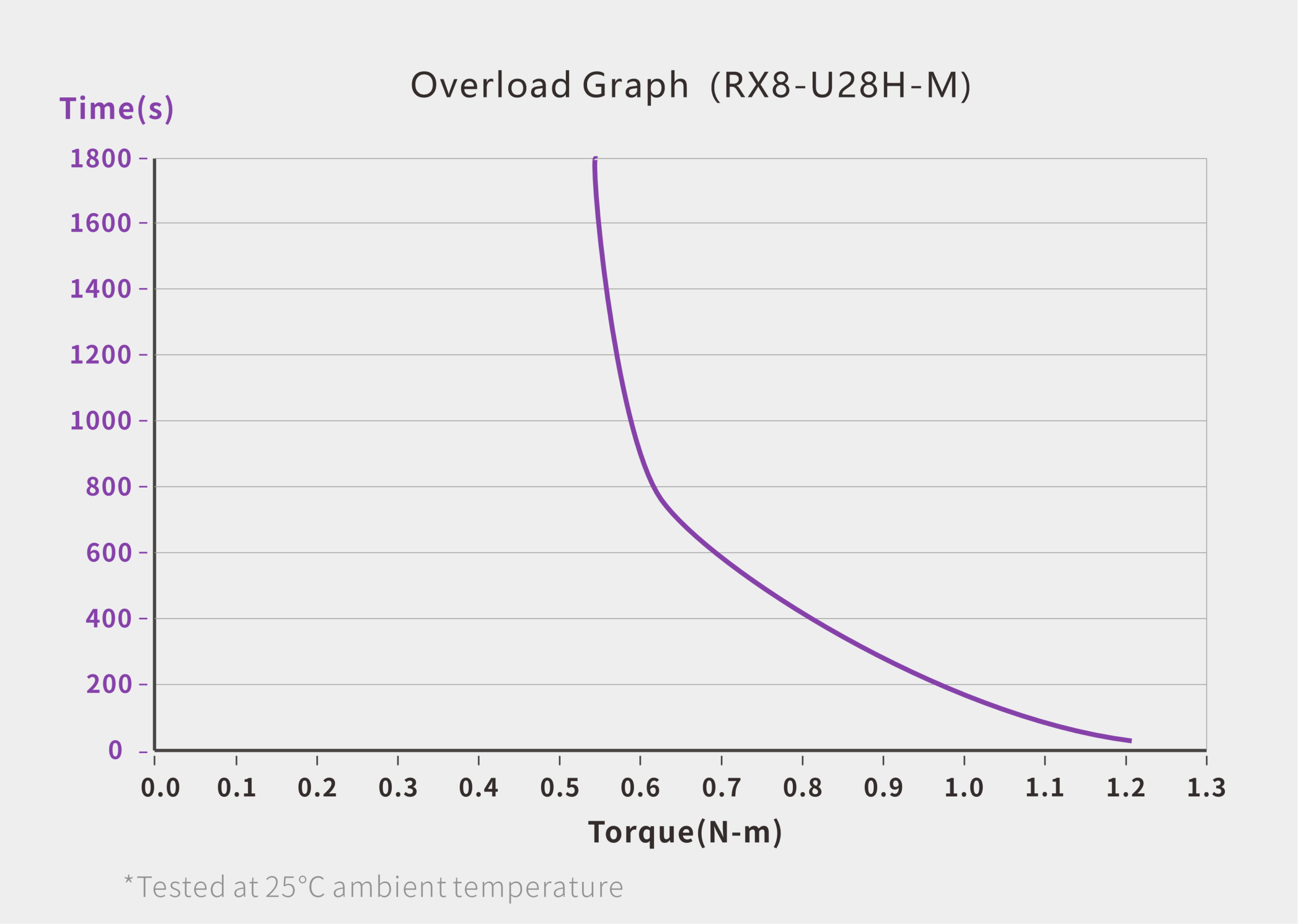
| Couple maximal continu |
1,18N-m (12kg-cm) |
| Couple nominal |
0,44N-m (4,5kg-cm) |
| Vitesse nominale |
116rpm (0.086sec@60°) |
| Vitesse à vide |
142rpm (0.070sec@60°) |
| Courant à vide |
<300mA |
| Courant de veille |
<40mA |
| Courant de pointe |
5.5A |
| Charge axiale |
20N |
| Charge radiale |
40N |



Bus Servo RS-485 (RX8-R55H-M)
$200.00

Bus Servo RS-485 (HX8-R29W-M)
$200.00

Bus Servo RS-485 (HX8-R28W-M)
$200.00
Bus UART Servo (RP6-U18H-M)
$200.00
Avis
Il n’y a pas encore d’avis.