


| Protocol Type |
PWM |
|---|---|
| Input Voltage |
4.8-8.4v |
| Motor Type |
Iron motor |
| Position Sensor |
Potentiometer |
| Effective Position Range | |
| Resolution |
2048/180° |
| Processor |
32bit MCU |
| Output Spline Specification |
Aluminium / Ø6mm / 25T |
| Gear Material |
All-metal copper-aluminum composite gear material |
| Interface |
PH2.0-3Pin |
| Case Material |
Aluminum alloy middle frame with upper/lower engineering plastic housings |
| Dimensions |
40×20×40mm |
| Appearance |
Dual-shaft |
| Weight |
53g |
| Operating Temperature |
-10~60℃ |
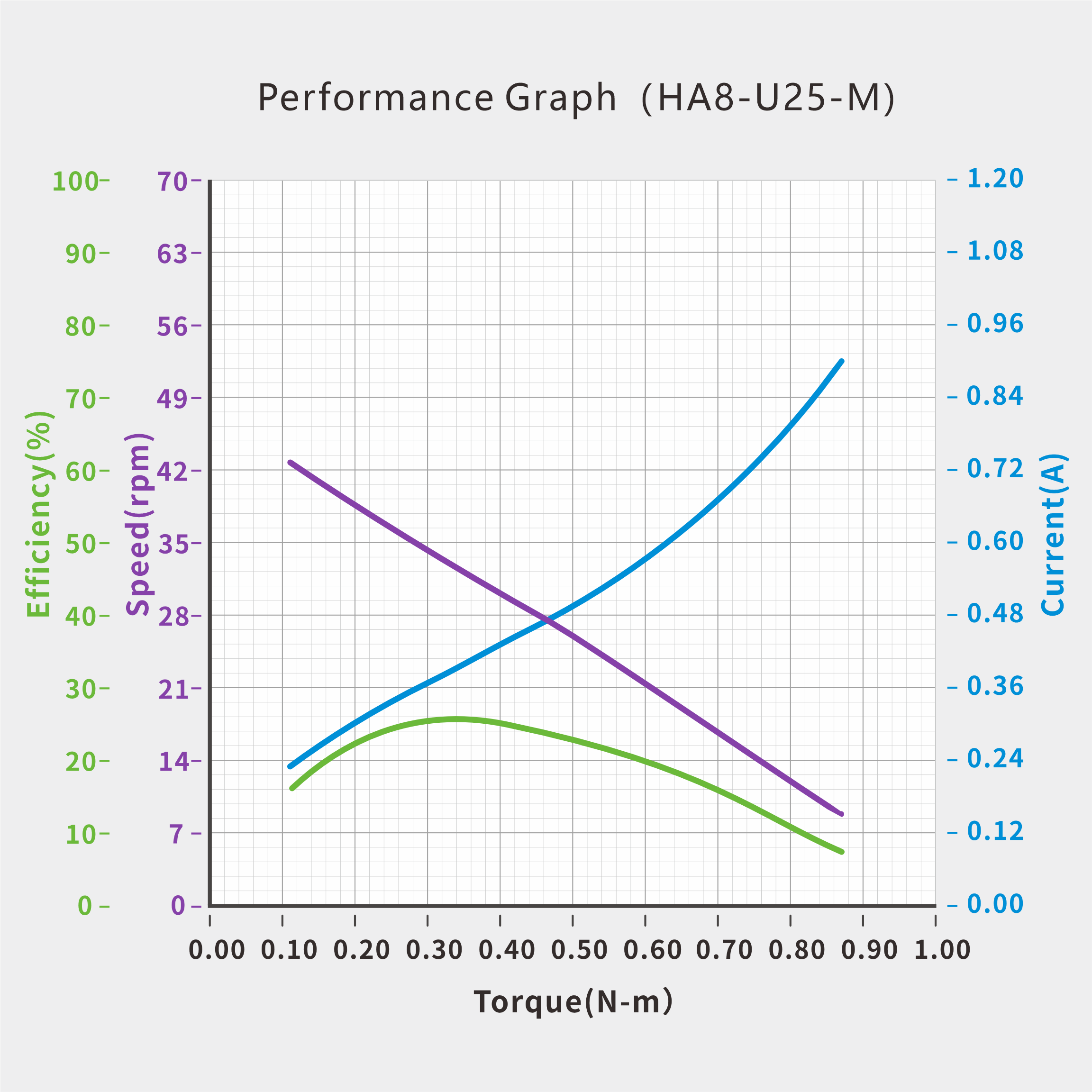
| Max Stall Torque |
3.43N·m (35kg-cm) |
| No Load Speed |
48rpm(0.208sec@60°) |
| No Load Current |
<200mA |
| Standby Current |
<20mA |
| Peak Current |
3A |
| Axial Load |
20N |
| Radial Load |
40N |




RS-485 Bus Servo (HX8-R51W-M)
$200.00

RS-485 Bus Servo (HX8-R50W-M)
$200.00
UART Bus Servo (RP6-U18H-M)
$200.00
UART Bus Servo (RX6-U12H-M)
$200.00
Reviews
There are no reviews yet.