











| Protocol Type |
UART |
|---|---|
| Input Voltage |
9.0-12.6v |
| Motor Type |
Brushless motor |
| Position Sensor |
12-bit magnetic absolute encoder |
| Effective Position Range |
±180° (Single-turn Position Control Mode) | ±368,640° (Multi-turn Position Control Mode) |
| Resolution |
4,096/360°(0.088°) |
| Processor |
32bit MCU |
| Baud Rate |
9,600bps~1Mbps |
| ID Range |
0~254 |
| Reduction Ratio |
173:1 |
| Output Spline Specification |
Stainless Steel / Ø6mm / 25T |
| Gear Material |
All-metal stainless steel composite gear |
| Interface |
PH2.0-3Pin |
| Case Material |
CNC aluminum alloy housing |
| Dimensions |
40×20×40mm |
| Appearance |
Single-shaft |
| Weight |
83g |
| Operating Temperature |
-10~60℃ |
| Operating Mode |
Single-turn Position Control Mode | Multi-turn Position Control Mode | Damping Mode |
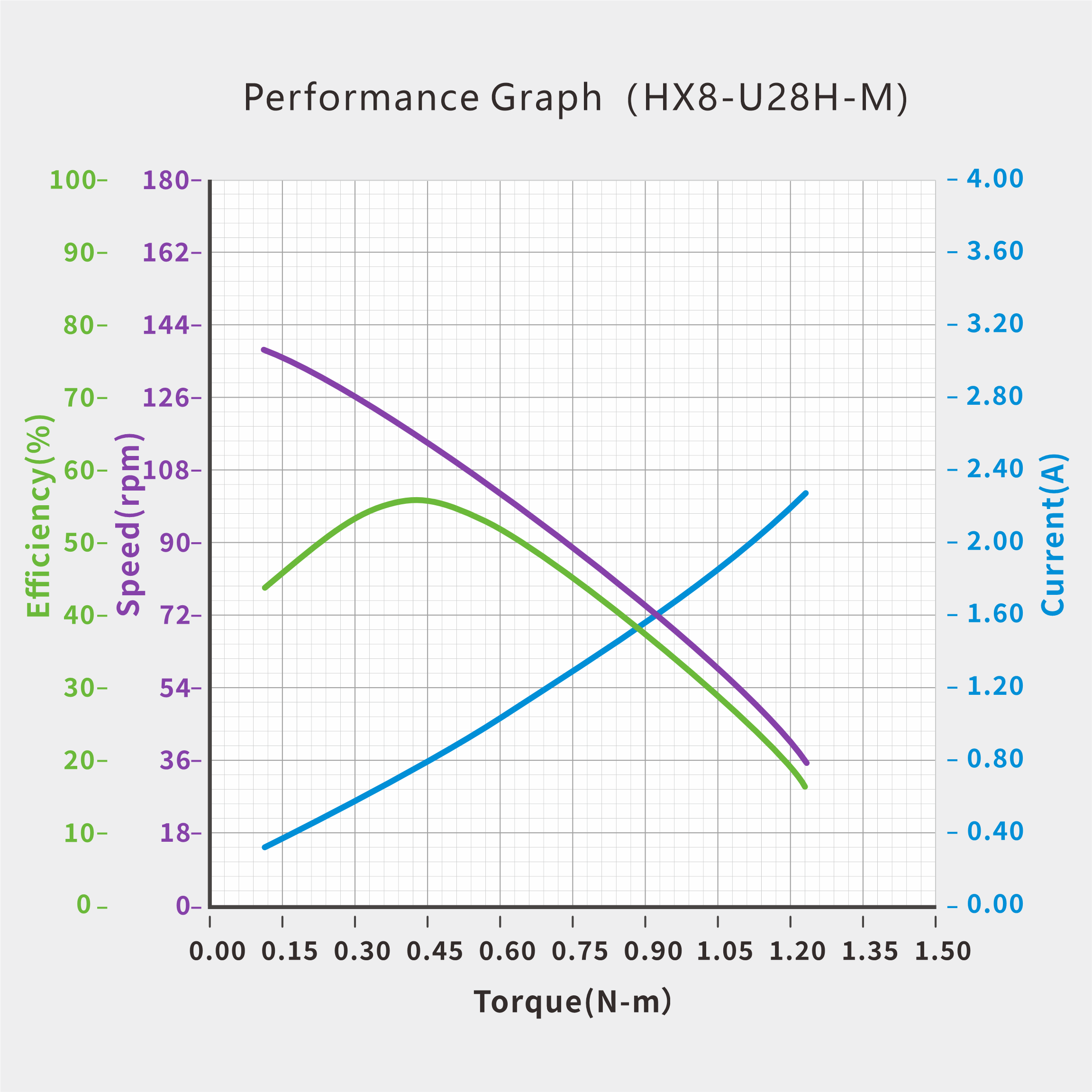
| Max Stall Torque |
2.74N·m (28kg-cm) |
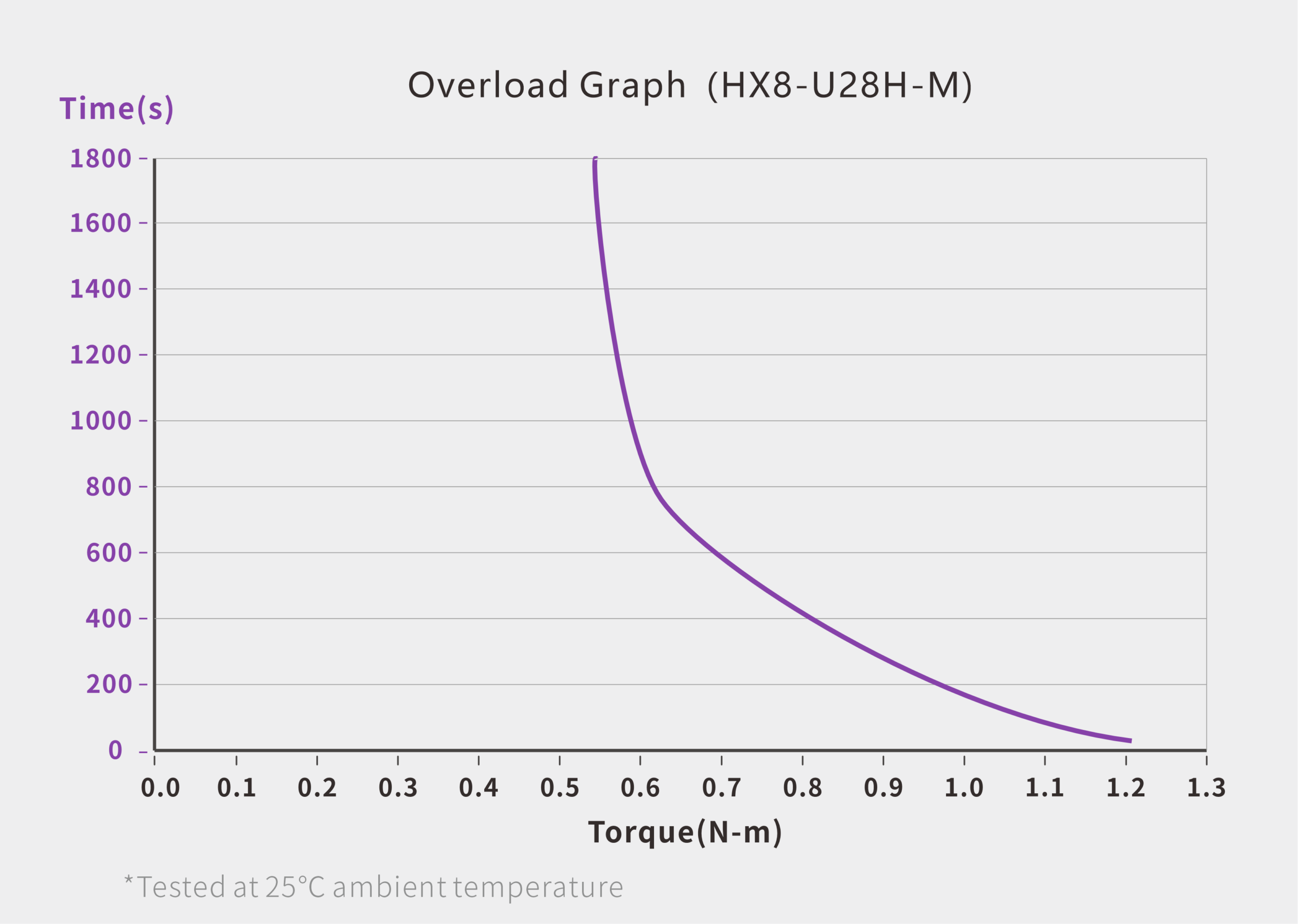
| Max Continuous Torque |
1.18N·m (12kg-cm) |
| Rated Torque |
0.44N·m (4.5kg-cm) |
| Rated Speed |
116rpm (0.086sec@60°) |
| No Load Speed |
142rpm (0.070sec@60°) |
| No Load Current |
<300mA |
| Standby Current |
<40mA |
| Peak Current |
5.5A |
| Axial Load |
20N |
| Radial Load |
40N |



RS-485 Bus Servo (RX8-R55H-M)
$200.00

RS-485 Bus Servo (HX8-R51W-M)
$200.00

RS-485 Bus Servo (HX8-R29W-M)
$200.00
UART Bus Servo (RP6-U18H-M)
$200.00
Reviews
There are no reviews yet.