





")
")












| Poids | 2 kg |
|---|---|
| DOF |
6+1 |
| Amplitude des articulations |
Joint 1 : ±120° | Joint 2 : ±163° | Joint 3 : 0°~270° | Joint 4 : ±88° | Joint 5 : ±66° | Joint 6 : ±168° | Gripper : 0~120° |
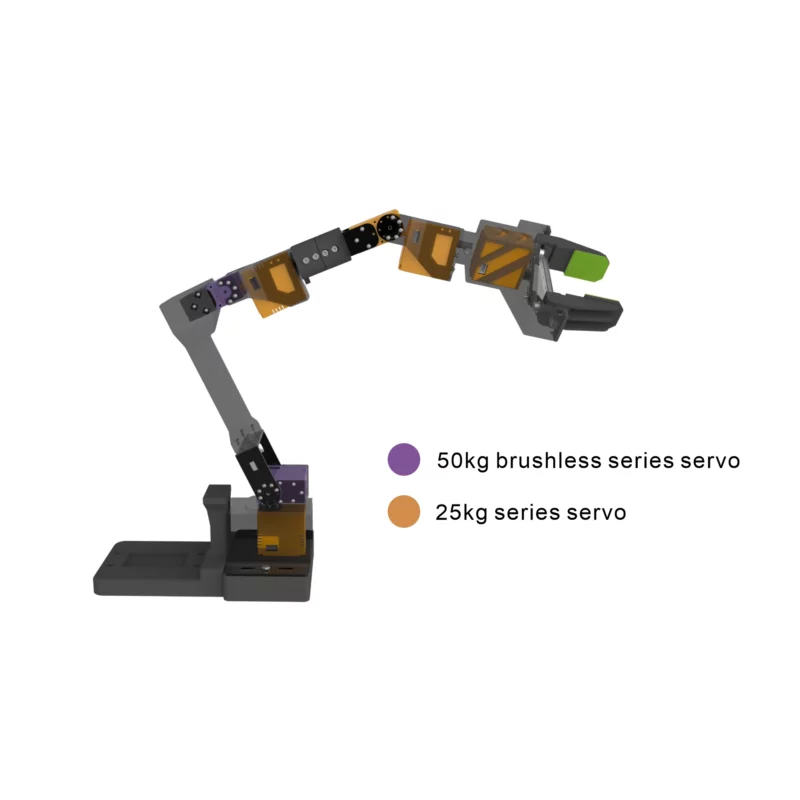
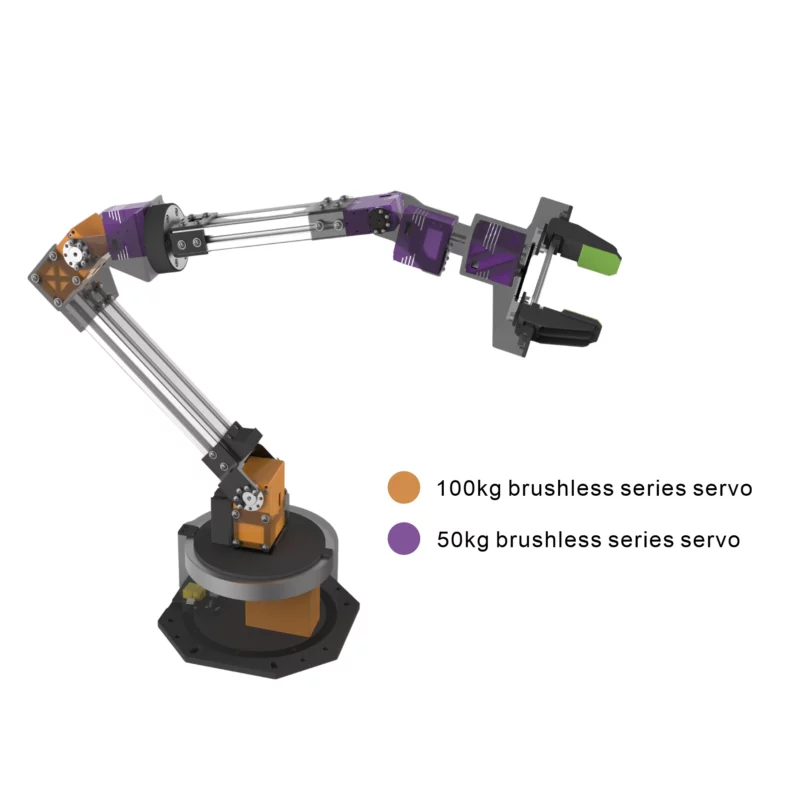
| Servos |
RA8-U01H-M pour les joints #1, #2, #3, et #4 | RA8-U02H-M pour le joint #5 | RA8-U03H-M pour les joints #6 et #7 |
| Centre de communication |
UC-01 |
| Alimentation électrique |
12V2A / XT30 |
| Poids |
663g |
| Température de fonctionnement |
0-40℃ |
| Fonctionne avec ROS 2 |
✓ |
| Fonctionne avec Lerobot |
✓ |




Ensemble alto+violon
$969.00

Ensemble violoncelle+violon
$1,999.00
StarAI Arm Viola (Follower)
$499.00

StarAI Arm Violin (Leader)
$499.00
Avis
Il n’y a pas encore d’avis.